Электронный контроль стабильности или система курсовой устойчивости.
Electronic Stability Control (ESC), Vehicle Dynamic Control (VDC), Dynamic Stability Control (DSC), Electronic Stability Program (ESP), Vehicle Stability Control (VSC), а также Vehicle Stability Assist (VSA) — под такими наваниями может пониматься один из самых значительных активных систем безопасности в современных автомобилях. Основная функция этой системы заключается в улучшении управляемости автомобиля и предотвращении возможных аварий во время тяжелых и рискованных маневров вождения (например, при крутом повороте на боьшой скорости или смене полосы с помощью экстренного торможения). Как правило, эти системы стабилизируют транспортное средство, применяя необходимый момент рыскания (генерируемый индивидуальным тормозным усилием на каждом колесе) и регулируя угол бокового скольжения транспортного средства на основе сравнения состояния транспортного средства и действий водителя. Некоторые системы ESC также уменьшают мощность двигателя во время арессивного, резкого управления.
При очень сложном повороте, особенно на скользкой дороге, транспортное средство может давать сильный крен или уходить в занос не слушаясь руля. Эта ситуация называется недостаточной поворачиваемостью или избыточной поворачиваемостью. В ситуации избыточной поворачиваемости автомобиль заносит, потому что задние колеса теряют сцеплеие с дорогой и скользят. Недостаточная поворачиваемость возникает, когда передние колеса теряют сцепление с дорогой и автомобиль не входит в поворот.
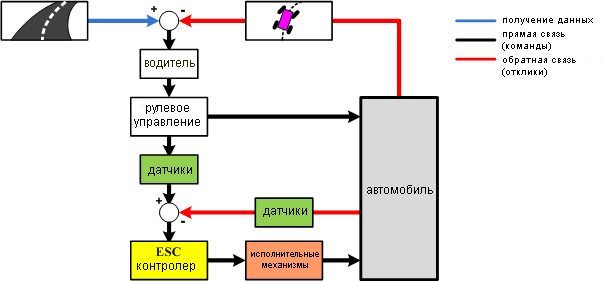
Электронная архитектура контроля устойчивости
На рисунке выше показана архитектура типичной системы контроля устойчивости, включающая три основных элемента: водитель, транспортное средство и окружающая среда. Система ESC использует угол поворота и скорость автомобиля для расчета предполагаемой траектории пути транспортного средства. Используя датчик скорости рыскания в сочетании с датчиком поперечного ускорения, система вычисляет фактический путь транспортного средства. В нормальном контуре управления водитель обнаруживает отклонение транспортного средства от текущей дорожной траектории и исправляет его через систему рулевого управления. Когда возникает вероятность потери контроля над транспортным средством водителем, электронная система контроля устойчивости определяет отклонение между предполагаемым путем движения транспортного средства и фактическим путем движения транспортного средства. Система ESC генерирует необходимый момент рыскания, автоматически активируя тормозное усилие на нужном колесе, чтобы вернуть транспортное средство к намеченной траектории.
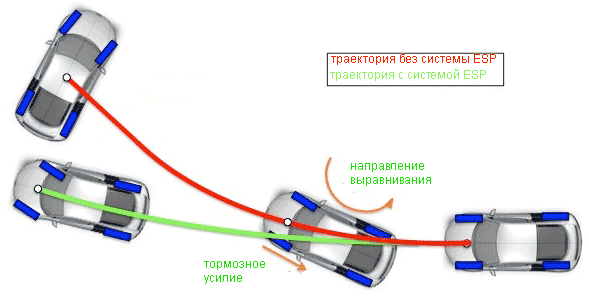
иллюстрация избыточной поворачиваемости
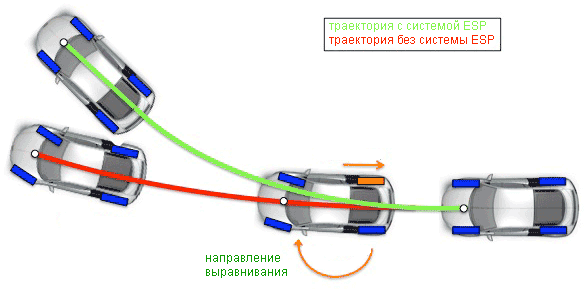
иллюстрация недостаточной поворачиваемости